蠕虫由于柔软可变形的身体,其爬行运动具有很好的环境适应性,因此类蠕虫爬行机器人吸引了广泛的关注,未来可能被应用于地表勘探、管道检测、肠胃内窥镜检查等工作空间受限的场合。蠕虫爬行依靠身体变形配合与地面产生的不对称摩擦前进,主要类型包括毛毛虫类的面外弯曲和蚯蚓类的面内收缩,在极端狭窄的环境下,面外弯曲会受到一定的限制,因此面内收缩型在工作空间要求上具有更大的优势。常见基于面内收缩的爬行机器人使用电机气泵驱动的可收缩结构,具有系统结构复杂、体积庞大或管线束缚等局限,不适合受限空间的小型化应用场合,例如人体内的医疗应用;可收缩的智能软材料结构简单,但材料的低刚度使得其面对拥挤环境时无法克服来自环境的阻力,例如组织器官等接触很常见的胃肠道。因此,设计既可实现有效收缩运动又可以克服来自侧向阻力的爬行机器人将对此类极端环境应用十分重要。

针对上述问题,斯坦福大学赵芮可教授团队提出一种基于磁驱动Kresling折纸结构的微型爬行机器人,通过分布式磁化设计和磁场控制可以实现灵巧的导航,同时其各向异性和磁场可调的结构刚度特性保证了其有效的克服来自侧向的运动阻力,并通过狭窄空间定向送药的实验,展示了其未来医疗应用的潜力,相关研究成果以“Soft robotic origamicrawler” 为题发表在《Science Advances》上,并被选为当期封面论文。
Kresling折纸结构具有耦合旋转-收缩的结构特征,可以通过转矩或力产生收缩变形,当被用来设计爬行机器人时,除有线驱动器带来的不易小型化等缺点外,其结构收缩时两端的相对旋转将造成机器人的侧向位移(图1A),使其难以实现标准的直线运动。为此,研究团队提出一种四单元Kresling爬行机器人,通过采用Kresling双极子(dipole)结构用以抵消单个Kresling收缩时结构两端的相对位移(图1B),进一步将两个相同的双极子以中心对称的方式连接,使得机器人中心位置在结构同步收缩时同样不会发生旋转(图1C)。
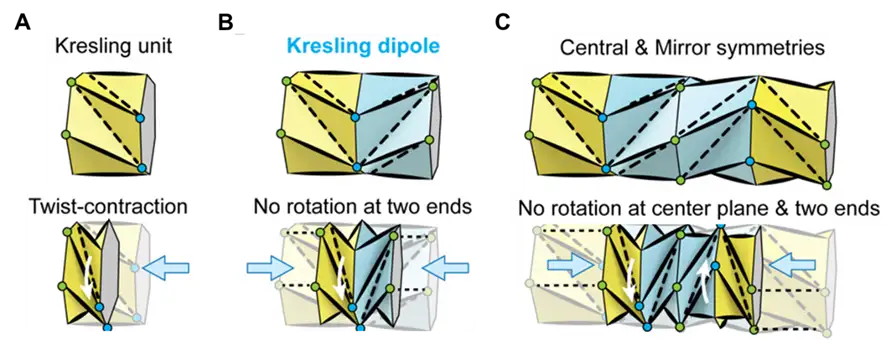
图一:基于Kresling双极子(dipole)和双对称结构设计的Kresling爬行机器人的收缩原理
为了保证机器人的四个单元同步收缩,团队成员设计了如图2A所示的分布式转矩,并通过理论推导和有限元验证得出各转矩之间的相对关系。将分布式磁驱动器加载到机器人指定位置(图2B),并通过动态磁化分布设计,机器人各单元可以在磁场驱动下实现同步收缩(磁场方向与磁化分布的合矢量方向一致),可以看到机器人的两端在收缩过程中始终没有旋转(图2C)。
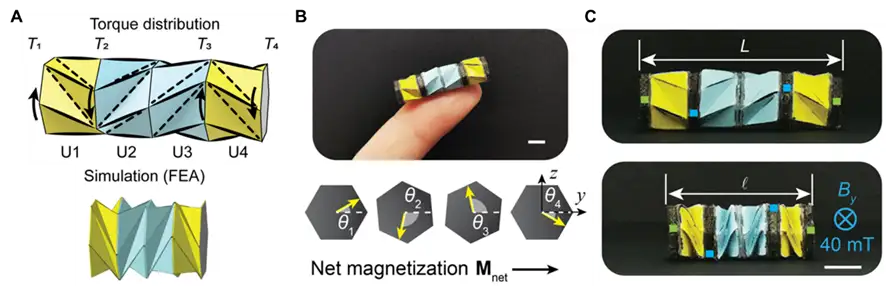
图二:Kresling爬行机器人采用分布式磁驱动保证各单元同步收缩
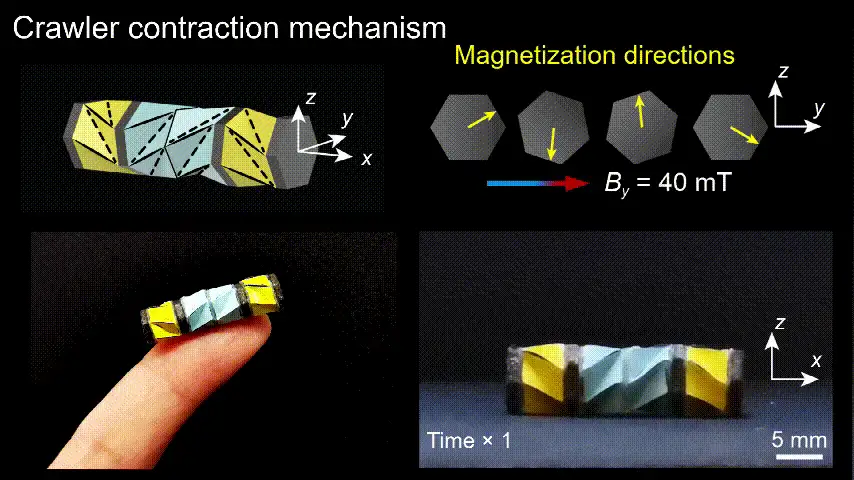
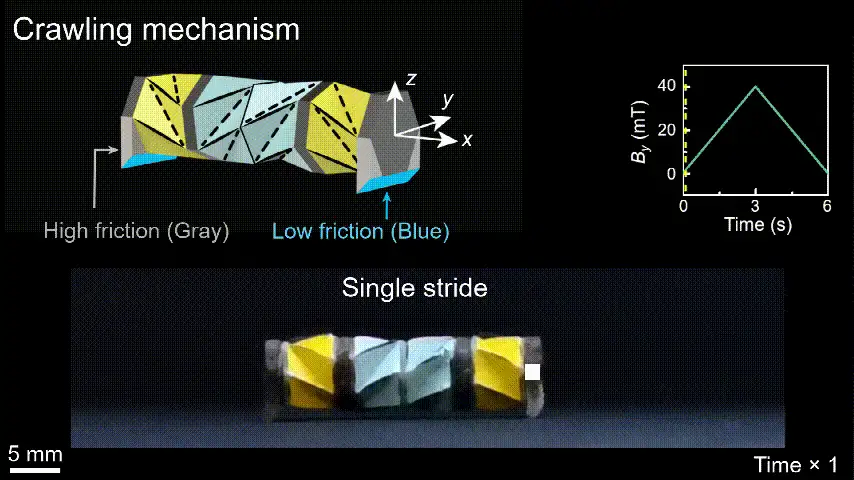
由于所设计Kresling单元为单稳态结构,撤除磁场后,机器人即可展开恢复初始状态,利用此机理团队成员进一步设计了机器人的双脚用于在收缩/展开过程中与地面产生不对称摩擦,保证高效的方向性爬行(图3),当施加周期性磁场,机器人可以通过往复的收缩/展开变形沿直线向确定方向爬行。

图3:Kresling爬行机器人运动原理
在医疗环境内,组织器官间的接触将产生很大的阻力,影响机器人的运动和其他功能。本工作所提出的Kresling爬行机器人具有独特的各向异性结构刚度,机器人轴向结构刚度不到10kPa,容易实现驱动收缩(图4A),而其径向结构刚度接近1MPa,可以有效防止环境阻力可能造成的机器人结构损坏(图4B)。同时当施加与机器人合矢量方向相反的磁场,机器人轴向的刚度可以随着磁场强度的增加而逐渐增加(图4A),磁场可调的刚度将帮助机器人在展开时克服来自环境的阻力。在模拟的狭窄环境中,机器人在展开的过程中施加-20mT的磁场用以加强轴向的刚度,从图5C和视频中可以看出,机器人可以有效的克服顶端薄膜带来的前进阻力。
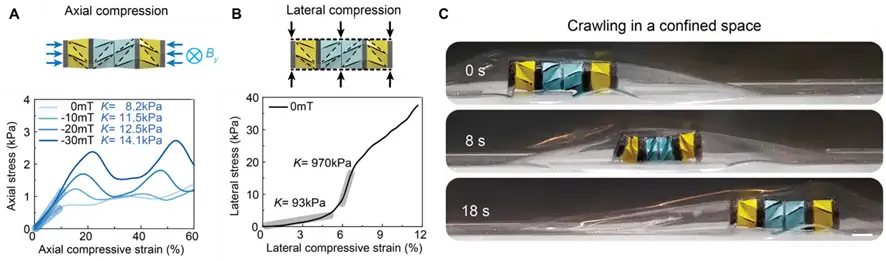
图4:各向异性和磁场可调结构刚度帮助机器人克服狭窄空间内的前进阻力

除上述展示的沿直线爬行外,磁驱动亦特别方便实现机器人转向,如图5A所示,机器人的合矢量方向始终跟随所施加磁场的方向。当改变磁场的方向,机器人可以迅速通过刚体转动实现转向。利用此原理可以通过控制磁场方向实现机器人沿任意路径的导航,例如“Z”路径和“O”路径(图5B和C)。
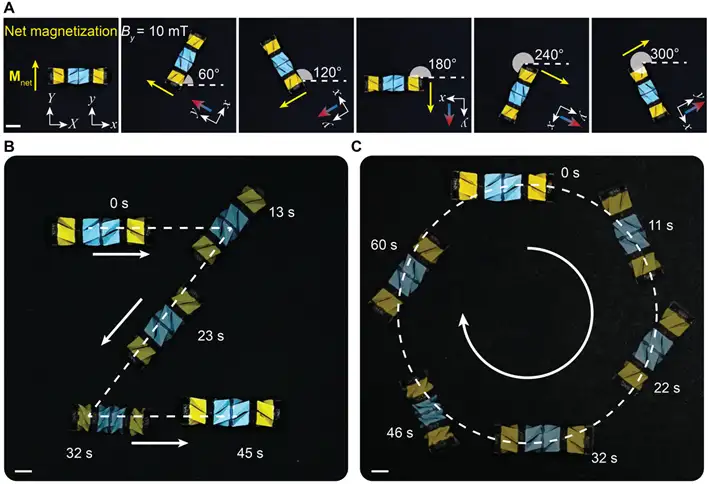
图5:Kresling爬行机器人的转向和导航

Kresling爬行机器人的另一大优点来自其壳结构,其内部空腔可以用来集成多功能器件,本工作将一个水溶性药片固定于机器人空腔内(图6A)进行定向送药的展示,可以看到在机器人收缩的过程中,药片不会影响机器人正常运动(图6B),当机器人到达指定位置并被水包围,储存在机器人内的药片会逐渐溶解并释放到目标位置(图6C)。

图6:Kresling爬行机器人内部空腔可用来集成不同组件,实现例如定向放药等医疗功能
结合Kresling机器人的多项优点,机器人内部还可以考虑集成微型摄像头或医用钳用于胃肠环境下的内窥镜检查或生物活检,除此之外先进的加工方法也有助于进一步缩小机器人尺寸,推动未来更多医疗环境下的应用。
团队介绍
该工作由斯坦福大学软智能材料实验室(Soft Intelligent Materials Laboratory,链接: https://zhaolab.stanford.edu/)完成,博士后迮弃疾,博士生吴帅为论文的共同一作。
赵芮可教授团队近年来通过力学指导的新型磁驱软材料以及新型结构的结合设计,在磁驱软材料与器件制备、加工与多功能化取得系列进展,详情见报道:
【1】《先进材料》封面:磁驱形状记忆高分子——形状记忆与快速形变的完美结合;《PNAS》折纸也能用来计算?
【2】赵芮可教授/齐航教授合作《AFM》——磁驱软材料,让超材料活起来
【3】磁驱软材料连发AM封面:新型磁性动态高分子问世!
【4】斯坦福赵芮可教授团队最新《PNAS》:可伸缩、扭曲的万向仿生机械臂,有望实现远程无线操控手术