优良、便捷的人机交互系统促进着人类科技水平的更新,也为人类生产生活带来了巨大的便利。目前的大多人机交互主要基于视觉和听觉反馈系统,而先进的触觉反馈系统同样是人机交互领域的重要工具。近年来,基于电磁、形状记忆合金、或磁流变液等技术的机械触觉反馈装置虽已应用于显示器、机器人和虚拟现实等系统中,但是这些设备往往体积庞大且不灵活,并且在应用中存在容易失真的问题。新的技术和工具亟待突破,特别是基于柔性器件的触觉反馈和交互系统将会有着更加广阔的应用前景。

图1 驻极体柔性执行器的工作原理图
近日,清华大学深圳国际研究生院先进制造学部钱翔、王晓浩团队和美国加州大学伯克利分校林立伟团队合作,利用气流辅助电晕充电装置对驻极体薄膜材料充电,构建了聚二甲基硅氧烷(Polydimethylsiloxane, PDMS)、全氟乙烯丙烯共聚物(Fluorinated ethylene propylene, FEP)及导电聚合物PEDOT:PSS组成的三明治结构的柔性执行器系统(图1)。器件在具备柔性的同时透明性能也较好,可以覆盖在任何有触觉反馈需求的人机交互系统表面。通过理论模型和实验验证表明,这种柔性驱动器的驱动电压可在低至20V时保留刺激皮肤的感觉,实现基本的触觉反馈功能。在200V的驱动电压下,该系统可以产生约55mN的输出力,大于一般市售手机在振动模式下的输出力(图2)。该柔性驻极体执行器阵列可通过任意波形编程方式在人体皮肤上产生可分辨的空间和强度差异,从而可以编辑出不同“指令”式的触觉反馈信号。
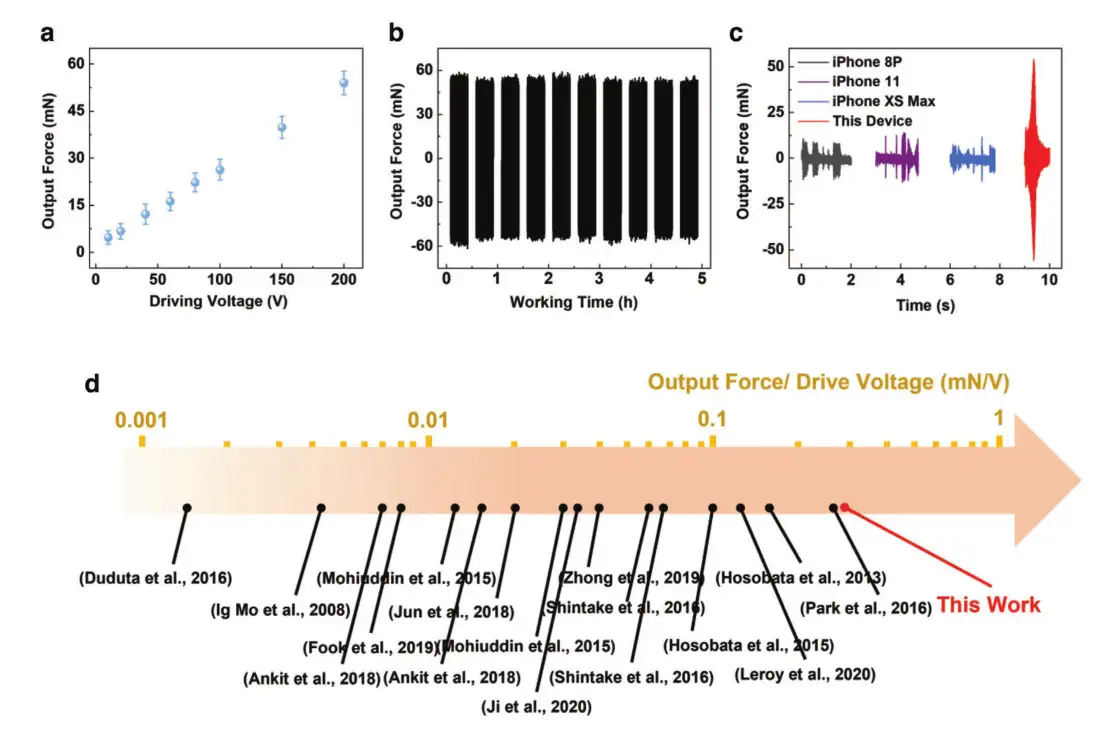
图2 输出性能评估
在该器件的基础上,研究团队设计了完整的认知辅助系统,并针对盲人辅助给出了两类人机界面演示(图3)。一个演示是带有可编程指令集的触觉辅助导航系统,通过编辑波形指令代表“前进”“停止”“左转”“右转”等,可以在外界嘈杂环境下替代语音交互进行辅助导航。另一个演示是基于触觉感知的盲文阅读辅助模型,通过6像素执行器阵列生成特定输出模式,用以辅助人机交流。未来,研究团队将进一步拓展该器件在生物医学以及文创交互等领域中的应用。

图3 柔性驻极体执行器触觉反馈演示应用示意图
相关成果近日以“基于柔性驻极体执行器的可编程触觉反馈模式实现认知辅助”(Programmable Tactile Feedback Patterns for Cognitive Assistance by Flexible Electret Actuators)为题在线发表在《先进功能材料》(Advanced Functional Materials)上。
清华大学深圳国际研究生院钱翔副教授、澳门大学钟俊文助理教授和美国加州大学伯克利分校林立伟教授为本文通讯作者,论文第一作者为清华-伯克利深圳学院2017级仪器科学与技术专业博士生姜滔。论文其他作者还包括清华大学深圳国际研究生院王晓浩教授,清华-伯克利深圳学院2017级仪器科学与技术专业博士生邱文瀛,2018级电子信息(仪器仪表)专业硕士生叶星,2020级电子信息(智能制造)专业硕士生柳雨含,2019级电子信息(仪器仪表)专业硕士生李宇时等。研究工作得到了深圳市科技创新委员会技术攻关项目的支持。
原文链接:
https://onlinelibrary.wiley.com/doi/10.1002/adfm.202107985