显示可编程形状变换的水凝胶执行器有望成为未来生物医学和软机器人设备的核心组件。然而,目前的水凝胶致动器存在机械性能差、响应慢、缺乏形状可编程性等缺点,限制了其实际应用。现有的分子设计在单个水凝胶系统中协同解决这些问题的效率有限。

最近,南昆士兰大学科研团队提出了一种策略来开发具有肌肉模拟对齐微纤维形态的水凝胶致动器,结合热致微相分离和机械对齐。我们设计的关键是引入金属-酚类配合物,它不仅通过低于临界溶解温度(LCST)以上的浓缩配位离子诱导不可逆的溶胶-凝胶转变,而且由于动态网络重排而固定束网络的排列。观察到团队的设计理念同时实现了优异的机械性能(抗拉强度 ≈ 1.27 MPa,韧性 ≈ 2.0 MJ m-3)和超快驱动(40.1% 热收缩,短至 1 秒),这是一个长期的挑战。场地。此外,动态水凝胶可以重新编程为螺旋、螺旋和仿生致动器。这项工作通过从根本上打破当前的性能限制,为实现智能水凝胶作为软机器的实际应用开辟了新的机会。

图 1. 基于热致相分离和机械对准相结合的水凝胶致动器设计示意图。它利用高于较低临界溶解温度 (LCST) 的热聚合聚合物链,通过形成更多的三邻苯二酚-Fe3+ 络合物和 Fe3+-羧基络合物来增强金属配位交联密度,从而产生具有束状结构的大孔热凝胶。然后通过在升高的温度下机械拉伸这种溶胶-凝胶不可逆热凝胶,实现了类似肌肉的定向微纤维结构,其中发生了工程超分子相互作用的动态交换。
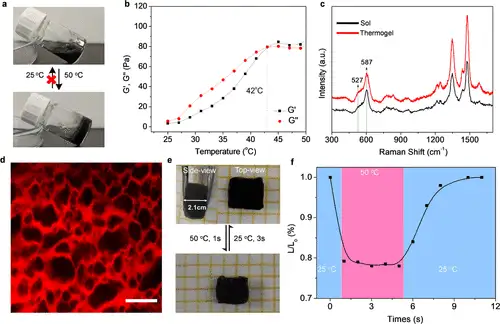
图 2. 溶胶-凝胶不可逆水凝胶的表征。

图 3. 各向异性肌肉样水凝胶的特征。

图 4. 通过网络重排重新配置螺旋、螺旋和仿生执行器。(a)通过利用超分子交联网络的动态特性促进网络重排,各向异性水凝胶的形状可重编程性示意图。(b) 显示退绕/卷绕变换的可逆变化和(c)“S”形螺旋致动器的消失/出现的照片。(d, e) 重新编程的各向异性水凝胶可以通过改变水介质的温度来模拟飞鸟 (d) 和醒目的蛇 (e)。
总之,我们开发了一种简单而创新的设计概念,通过结合不可逆的溶胶-凝胶热凝胶化和拉伸对齐来解决与软水凝胶致动器相关的长期挑战。这种独特的概念设计实现了高机械性能、超快响应和多种形状可编程性的结合,例如,拉伸强度高达 1.27 MPa,韧性为 2.0 MJ m-3,1 秒内热收缩率为 40.1%,和各种复杂的 3D 执行器。关键是通过引入金属 - 酚类配合物,在 LCST 以上诱导热响应聚合物的不可逆溶胶 - 凝胶热相分离,导致大孔束状结构。在升高的温度下进一步机械拉伸通过网络重排产生各向异性水凝胶。这种类似肌肉的结构与工程超分子相互作用一起实现了出色的机械性能和超快的形状转换。这项工作代表了智能水凝胶执行器设计的概念性突破,在高级软机器人和人造肌肉中具有许多有前景的应用。

相关论文以题为Strong, Ultrafast, Reprogrammable Hydrogel Actuators with Muscle-Mimetic Aligned Fibrous Structures发表在《Chemistry of Materials》上。通讯作者分别是澳大利亚南昆士兰大学宋平安教授和王浩教授。
参考文献:
doi.org/10.1021/acs.chemmater.1c02312
本文版权归原作者所有,文章内容不代表平台观点或立场。如有关于文章内容、版权或其他问题请与我方联系,我方将在核实情况后对相关内容做删除或保留处理!联系邮箱: yzhao@koushare.com