生物体可以感知外界刺激并自动做出反应,这是由于它们有丰富分体感和神经肌肉系统。人类的手指、章鱼的手臂、大象的鼻子等柔软的肢体可以通过连续的动作完成复杂的任务。科学家们从仿生角度出发,研究人造机器人,希望通过将传感器、外部摄像头和执行器与计算控制系统耦合来完成感觉运动任务。然而这些复杂的多电子集成限制了体积小型化和更高水平的运动性,具有自我感知能力的智能软执行器仍然是一个挑战。
加州大学洛杉矶分校贺曦敏教授团队提出了一种软机器人策略:将驱动和应变传感耦合到单一的均质材料中,该材料由纳米结构的热响应水凝胶聚(N-异丙基丙烯酰胺)(PNIPAAm)和吸收光的导电聚合物聚吡咯(PPy)组成,呈互穿双网络结构。这种设计使材料具有光/热响应性和压阻响应性,使远程触发驱动和局部应变传感成为可能。研究内容以“Highly stretchable self-sensing actuator based on conductive photothermally-responsive hydrogel”为题发表在《Materials Today》。

PNIPAAm水凝胶的设计与制备
为了模拟生物的大变形、快速环境反应和多功能运动,在执行器中实现自感知功能,研究者们通过物理层压或嵌入手段设计各种传感装置,然而,由于传感器和执行器之间的模量不匹配,会导致界面上的器件损坏。传感和驱动模块也是预定义的,在处理复杂和不断变化的环境时限制了它的应用。科学家们开发了由新的刺激响应聚合物制成的驱动器,如液晶弹弹体(LCEs)、电活性聚合物(EAPs)、形状记忆聚合物(SMPs)和刺激响应水凝胶。这些材料具有固有的刺激响应性,因此能够实现高度灵活和复杂的局部变形。在这些软响应性聚合物中,水凝胶具有实现多功能性的潜力,因为它们能够在各种环境刺激下经历显著的体积变化,如温度、光照、pH、电场和化学物质等,可以用在给药的微型机器人、操纵物体的宏观致动器等多个领域。开发一种具有高延展性、高同质性、快速响应和变形感知能力(本体感受和外部感受)的cp -渗透性刺激反应水凝胶是非常必要的。
作者制备了一种多功能水凝胶,它耦合了光热机械路径、压阻机制的独立驱动和应变传感能力。由热敏、柔软、弹性的聚N -异丙基丙烯酰胺(PNIPAAm)和黑色导电聚合物聚吡咯(PPy)组成了均相cp -渗滤双网络水凝胶。纳米结构的PNIPAAm水凝胶具有高伸缩性(210%)、高响应率(比传统的PNIPAAm快6倍)和巨大的体积变化率(V/V = 70%)。通过改进溶液法将聚吡咯网络加入到PNIPAAm中,有效地防止了分层和填料聚集的问题。作者制作了一个圆柱型光响应驱动器,能够快速和全方位地自定向入射近红外(NIR)光,类似于活植物的向光性行为。此外,通过光诱导跟踪、弯曲、举重、抓取和通过阻力变化实时感知物体运动,证明了自感知驱动能力。
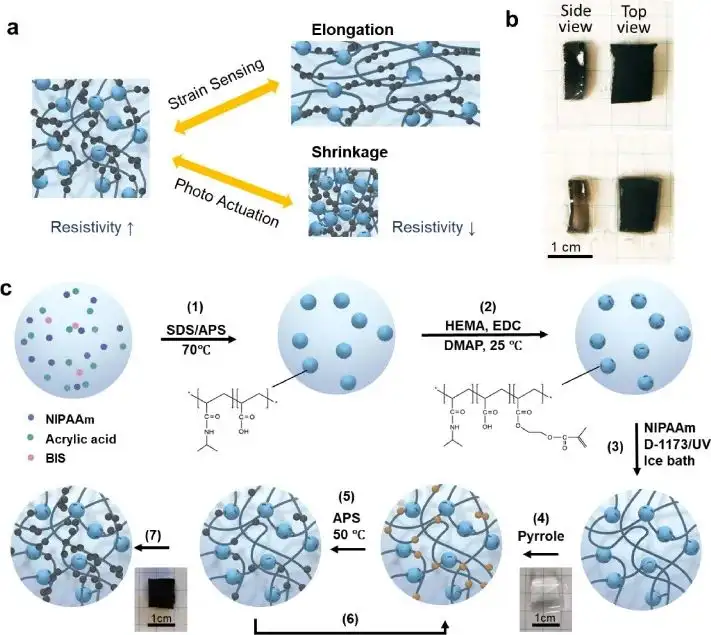
图1 (a)自感应驱动器的机理示意图:导电聚合物网络在受到外部应力或热刺激体积变化时的电阻率变化。(b)在PNIPAAm水凝胶中PPy分布较差的传统合成方法(底部)与均匀负载PPy的改性方法(顶部)的比较。(c) P(NIPAAm-co-AA)纳米凝胶和C- nanoH的制备工艺。
PNIPAAm水凝胶的性能
通过扫描电子显微镜(SEM)表征,不含PPy的纳米水凝胶(称为NanoH)呈现分层多孔结构(图2b)。与BIS交联的对照水凝胶相比,其孔径明显增大(图2a)。将NanoH与PPy混合后,水凝胶(称为c-NanoH)的孔径和形貌与NanoH相似(图2c)。相对较大的孔隙为水的有效扩散提供了途径,这使得C-NanoH的响应速度和恢复速度都比bis高。FT-IR光谱表征进一步确认PPy的成功掺入。
为了考察纳米结构水凝胶的变形能力,作者分析了c-NanoH、NanoH和bis在不同温度下浸泡15 min后的缩水率随温度变化,展示了一个显著提高的体积变化率,为13%。同时,总体积量变化也明显增大,为70%~84%的收缩。这种增强的抗膨胀性能可能是由于纳米级的交联位点以及接枝在纳米凝胶上的灵活的PNIPAAm链引起的。在高温浸泡水中后,柔性的PNIPAAm链可以自由聚集在纳米凝胶中,为水的扩散留下足够的空间。作者利用单轴拉伸的应力应变曲线来表征和描述复合水凝胶的力学性能。引入PPy网络(c-NanoH)后,复合水凝胶的断裂应力增加到30 kPa,而引入NanoH的断裂应力为13 kPa,这种增强的弹性行为可以归因于PPy和NanoH网络的相互渗透。

图2 PNIPAAm水凝胶(bis)的表征。
应用
c-NanoH在周期性拉伸-释放过程中电阻的循环可逆变化结果显示,与典型的水凝胶应变传感器相比,响应时间远小于1 s。将c-NanoH像电子皮肤一样贴在人类食指的关节,在多次弯曲和多循环变形过程中,相应的阻力变化是快速和稳定的。聚吡咯粒子互穿在复合水凝胶中发挥着多种作用,作为电子传递途径和光热传感器。作者合成了圆柱形的c-NanoH水凝胶柱。当近红外光以倾斜的角度照射在柱子的一侧时,它能够弯曲并自定向向光的方向。通过控制适当的光强,水凝胶的温度梯度导致了这种定向、不对称的运动。这表明复合水凝胶除了具有应变传感功能外,还通过光热机械转换表现出光响应性。

图3 (a-b) c-NanoH的全向光跟踪,响应光源方向显示多种多样的驱动。(c)全向跟踪柱形状变形和温度梯度仿真结果。
水凝胶在空气中足够强大,可以从单轴收缩中举起一小块重物,并在光线追踪中做仰卧起坐。作者还证明了在水下循环弯曲实验中,如果有足够的水,自感知驱动是稳定的和完全可逆的。弯曲角度的移动规律与阻力变化规律相吻合。此外,作者还展示了c-NanoH的自我感知能力,通过使用近红外光远程控制水凝胶章鱼手臂卷曲、抓取和移动物体,通过监测附着电极之间的电阻变化实现实时运动感知。

图4 (a)空气中自我感知举重。(b)空气中光线跟踪诱发的自我感应“仰卧起坐”。(c)稳定、完全可逆的水中自感知机器人。(d)弯曲角度与可逆自感知机器人在水中的阻力变化一致。(e)近红外控制局部刺激自感知抓取运动。
综上,作者提出了一种自感知驱动器,通过在超伸缩、快速热响应的纳米结构PNIPAAm水凝胶基质中原位聚合导电PPy聚合物网络实现。这种独特的设计可防止传感器-执行器界面模量不匹配导致的潜在裂纹和长期损伤,实现了精确控制的局部驱动。这种自感知的光热响应致动器为自感知“机器人”提供了一个平台,使微型软机器人实现了前所未有的闭环控制。
原文刊载于【高分子科学前沿】公众号
本文版权归原作者所有,文章内容不代表平台观点或立场。如有关于文章内容、版权或其他问题请与我方联系,我方将在核实情况后对相关内容做删除或保留处理!