多数的生物承重组织例如骨骼肌代表了典型的J形伸缩曲线,它们的初始软弹性模量在变形过程中迅速增加了几个数量级,这也被称为应变适应性增强性能。有意思的是,骨骼肌能在经过物理训练后发生自增强现象,这是由于肌纤维在训练过程中能够发生破坏和重构过程。而且,它们能够智能地将ATP的化学能转变为宏观运动以根据神经系统发送的信号调整周边环境。骨骼肌的这些组合性质是生物体在复杂的外部环境中生存下来所必不可少的,也给人们开发人工肌肉材料提供了指导。
人工开发的肌肉材料可以将外部刺激能量转变为宏观运动,因此在例如制作致动器,机械臂和相关的药用设备方面具有潜在的应用。令人欣喜的是,最近的一些研究报道了一些可以通过重复的机械训练进行自增强的水凝胶材料。然而,这些具有自增强性质的材料缺乏“智能”性质,例如这些材料不能响应外部刺激,对致动进行精确的调制以及不具有可编程控制的特征。迄今为止,将骨骼肌的全部特征(例如通过机械训练进行自我增强,应变适应性增强和在外部刺激下智能驱动)整合到单一合成材料中仍然是一个巨大的挑战。近年来,人们揭示了一些生物材料的优异机械性能部分归因于牺牲包括配位键和氢键在内的动态牺牲键来进行增强的机理。人们已经进行了许多努力来将动态的牺牲键结合到聚合物材料中以增强机械性能。然而,这些系统中的配位键随机分布在聚合物基质中,随后在变形过程中发生不规则断裂,从而使材料具有有限的应变适应性。
为此,广东工业大学邱学青教授和华南理工大学刘伟峰副研究员团队提出了一种策略,将牺牲配位键与机械训练过程相结合,以构建高性能的人造肌肉材料。该材料展示了较高的致动应变(大于40%),较高的致动应力(1.5 MPa),并且在30%的应变下可以举起自身重量的一万倍以上。该结构以题为“Biomimetic high performance artificial muscle built on sacrificial coordination network and mechanical training process”发表在《Nature Communication》上。

【人造肌肉材料的制备和机械性能】
人造肌肉材料的制备分三步进行:第一步为将形状记忆聚合物EPDM(见下图)与富含羟基和羧基的木质素混合八分钟,其中木质素是作为增强剂,可以作为配位化合物中锌离子的天然配体;随后在混合物中加入配位化合物二甲基丙烯酸锌(ZDMA)并混匀10分钟;最后是对混合物进行硫化剂处理,使聚合物和配位化合物中的双键发生交联。该材料可以用LxZy@m%来表示,其中L表示木质素,Z表示锌离子配合物,x和y分别表示L和Z的相对含量,m表示接受训练的强度。
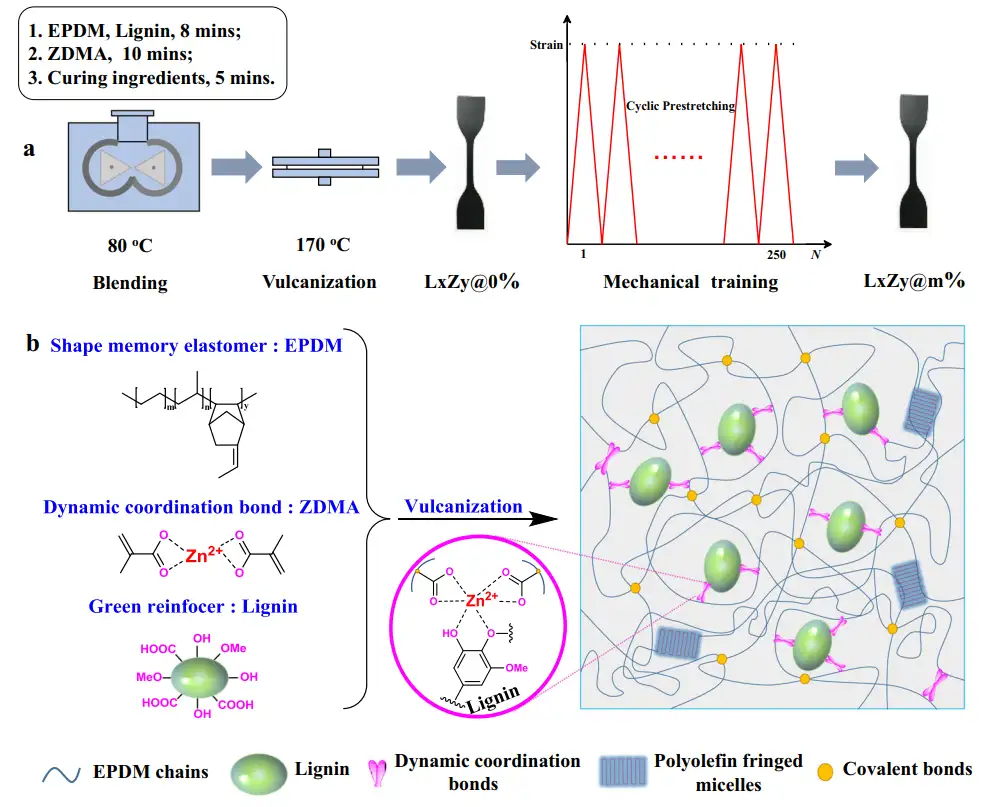
图1. 人造肌肉材料的制备
将未经训练的人工肌肉材料(L40Z12 @ 0%)进行机械训练,以模仿骨骼肌的自增强性能。训练过程是通过反复拉伸和去拉伸进行的。工程应力-应变曲线表明,最终的该高分子-木质素复合材料表现出明显的改善机械训练后的力量,就像体育锻炼对骨骼肌的自我增强作用一样。随着训练应变从0%增加到600%,复合材料的断裂拉伸强度逐渐从24.8 MPa增加到30.7 MPa。与L40Z12 @ 0%相比,L40Z12 @ 600%在200%应变下的应力增加了近2.5倍。将训练频率从100个周期增加到1000个周期会导致拉伸应力-应变曲线出现类似的变化趋势。在重复进行机械训练的预拉伸下,弹性体的残余应变也随着训练应变和训练频率的增加而逐渐增加,表明机械训练后,配位键稳定了链排列的某些部分。应力松弛固化还证实,机械训练后,只有部分高分子链松弛。
值得注意的是,这些材料经过机械训练后呈现出典型的J形应力-应变曲线,符合生物组织的应变适应性硬化特征。例如,当应变从75%变形到150%时,样品L40Z12 @ 600%的弹性模量从小应变时的2.0 MPa增强到33.2 MPa,增强了16.5倍。通过机械训练的自我增强效果和该复合材料的典型应变适应性与骨骼肌的机械性能非常吻合,证明了其作为人造肌肉材料的巨大潜力。有趣的是,经过机械训练后,弹性体的应力-应变曲线显示出明显的双级模量增强现象,这在以前很少报道,表明这种人造肌肉材料具有特殊的增强机制。
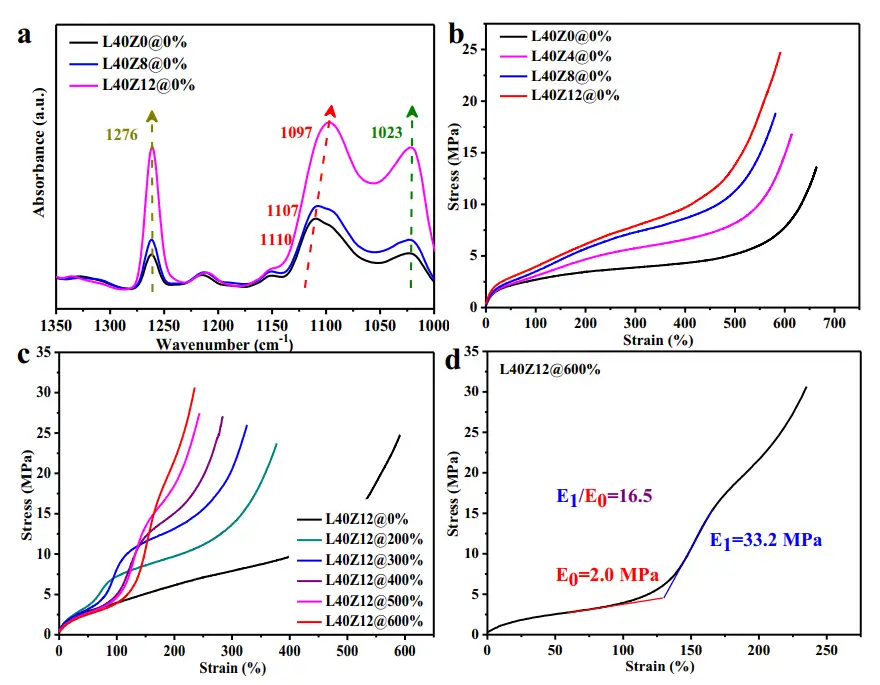
图2. 机械性能
【机械训练自增强机理】
通过研究,作者探索了这种材料经过物理训练后可以自增强的机理:在初始状态时,聚合物和木质素等缩成一团,内部处于平衡态,内部含有少量聚烯烃聚集形成的胶束,在材料特定方向施加较小的拉力时,内部的高分子链发生沿着拉力方向的定向排列,继续将拉力增加到中等时,材料内部的部分高分子链间的配位键开始发生断裂,形成了很多边缘不饱和的配位键,在此阶段牺牲的配位键承担了绝大部分的外部拉力,并将拉力的能量耗散,此时配位键的牺牲时该阶段材料的弹性模量大幅度增加,一旦失去配位键,高分子链段就会从木质素颗粒表面滑落导致弹性模量的大幅度下滑,并导致了该阶段S型的拉伸曲线,继续增大拉力,高分子链高度有序排列导致拉力诱导的结晶区域的出现,此时材料的弹性模量又可以急速变大,形成J型拉伸曲线。

图3. 机械训练自增强机理
【可编程致动性能】
通过两种方式可以调控该材料的编程式制动。包括热驱动以及电驱动。
使用1.3 MPa作为预加载的恒定应力,加热后,随着温度从-30℃升高到90℃,应变从21%转变为-20%,而在冷却过程中,应变值又随着温度降低到-30 ℃而恢复到原始长度。随着加热-冷却循环的重复,可逆应变变化表现出良好的可重复性。在此过程中,该人工肌肉材料的可逆驱动应变达到41%,这是有史以来在基于聚烯烃的驱动材料中获得的最大值。由基于EPDM的人造肌肉材料执行的驱动应变(41%)的值也满足了人体骨骼肌(40%)的要求。值得注意的是,该实验中,人工肌肉可以在30%的应变下提起205 g的重物,是其自身重力的10000倍。
使用电驱动的实验中,样品L20C20Z12 @ 300%被组装到一个程序控制的电路中。通过将电流值从5 mA调整为30 mA,基于EPDM的人造肌肉材料能够以7.0 g的可逆运动距离(|ΔL|)举起505 g负载(是其自重的2000倍,13%的应变),并且这种行为是可重复的。当电流值在0 mA和25 mA之间调整时,可逆的致动应变可以进一步提高到20%。这项工作中用于致动控制的电流值(5–30 mA)非常接近工业标准电流控制信号(4–20 mA)的要求。具有电可编程致动性能的人造肌肉材料在实际的工业应用中展示了巨大的潜力
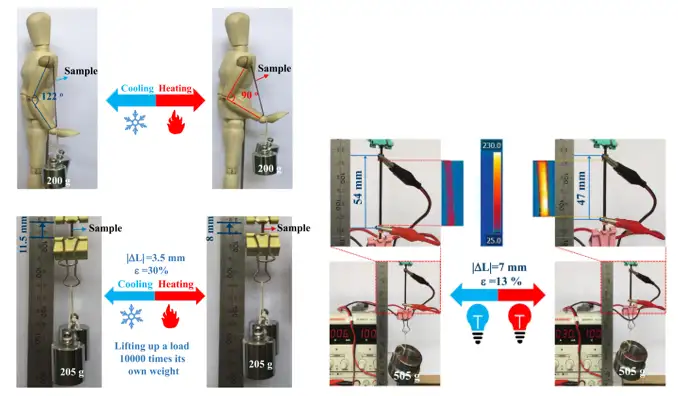
图4. 热控和电控可编程制动性能
总结:人造肌肉材料有望在执行器,机器人和医疗设备中得到令人难以置信的应用,但是将骨骼肌的全部特征模仿成合成材料的能力仍然是巨大的挑战。在该工作中,作者受到生物材料中牺牲键的启发,在高分子弹性材料中引入了配位键作为牺牲键,从而改变了材料的力学性质,使材料具有在物理训练的情况下自增强的性质。这种材料为新型智能材料的发展提供了新的机会。
全文链接:https://www.nature.com/articles/s41467-021-232
原文刊载于【高分子材料科学】公众号
本文版权归原作者所有,文章内容不代表平台观点或立场。如有关于文章内容、版权或其他问题请与我方联系,我方将在核实情况后对相关内容做删除或保留处理!