具有可逆驱动行为的合成材料,即人工肌肉,显著扩展了工程设备的功能设计能力,可用于许多应用,包括医疗、能量收集和软机器人。液晶弹性体(LCE)由于其固有的高致动倾向而不需要苛刻的外部刺激(如高压)受到特别关注。LCE驱动的一个先决条件是介晶排列,而目前尚未实现易于获取、高效且灵活的LCE中复杂介晶排列方法,这与人工肌肉达到运动复杂性的强烈愿望形成了鲜明对比。
为了应对这一挑战,浙江大学谢涛教授、郑宁博士和航空航天学院贾铮研究员等提出利用数字光固化作为一种超快的直接方法来制造具有驱动运动可设计性的LCE。该方法利用穿透平面方向上的固有光衰减,为可逆弯曲作用创建介晶对齐。该方法能够在25 s内光固化以制造高度可设计运动的LCE,而无需使用任何物理对准模板。相关工作于近期以题为“Ultrafast Digital Fabrication of Designable Architectured Liquid Crystalline Elastomer”发表在了《Advanced Materials》上,为设计功能多样的软机器提供了一个有吸引力的选择。

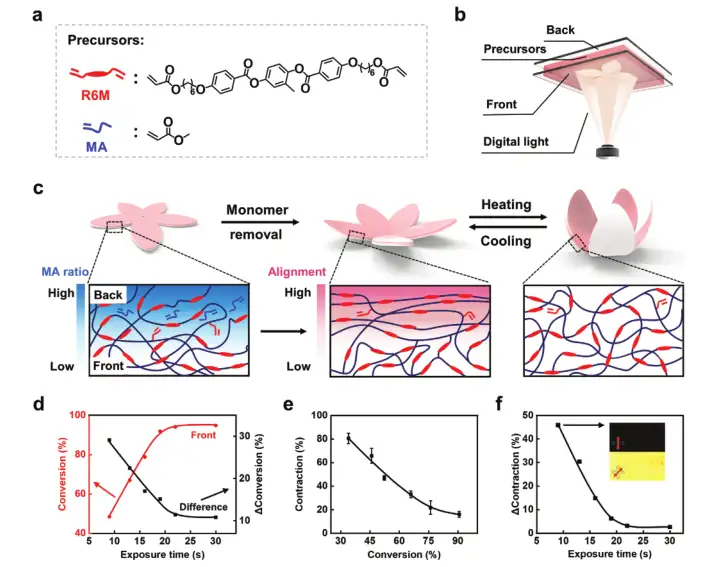
将液晶前体混合物注入由两个石英片制成的模具中,两个石英片由间隔片隔开。使用商用投影仪进行数字固化,通过平面光衰减获得梯度固化程度,正面具有最高的交联密度和最低的未反应单体含量,而背面相反。通过在70℃烘箱中加热过夜蒸发,未反应的单体在整个厚度方向上的不同程度的去除,使得固化平膜从平面转变成3D几何形状。
作为设计意图,介晶对齐应该来自微分体积收缩,而不是直接来自双键转换。然而,很难衡量梯度薄膜的体积收缩。为了建立两者之间的定量相关性,有必要最小化用更薄的薄膜减少光衰减。为此,研究人员选择了厚度为0.2 mm的垫片。发现体积收缩减少与双键转化成线性关系,但这种减少在高转化率时开始逐渐减少。利用上述相关性,正面和背面之间的转换差异可以转化为体积收缩的对比度。实验结果表明,对于厚膜(1 mm厚的间隔层),在9 s的曝光时间内观察到46%的体积收缩对比度,偏振光学显微镜图像证实了差异体积收缩导致LCE取向。
LCE的制备和表征
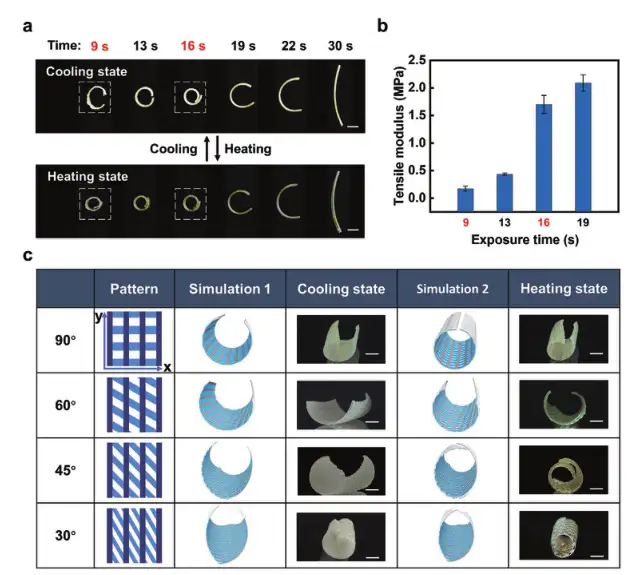
通过改变曝光时间,研究人员合成了一系列矩形样品。将样品在室温下制造的形状(室温定义为冷却状态)与130°C(通过热板加热实现的加热状态)下的形状进行比较。较长的曝光时间导致加热状态的曲率越来越小,对于冷却状态,曲率随着曝光时间的增加而增加。不同样品之间的比较表明,9 s的暴露时间产生最大的加热/冷却引起的形状变化,并且是可逆的。然而,这个样品非常软(模量:0.17MPa),相比之下,较长的暴露时间会得到更硬的材料。为了设计机械上更坚固的致动器,研究人员采用复合方法,在同一样本中组合两次曝光时间,利用这种建模工具有助于将来设计更复杂的模式。
两相复合致动器的设计
研究人员进一步研究了其他参数对驱动的影响。通过改变前体混合物中MA和R6M之间的重量比,生产出一系列样品以讨论驱动对材料化学的依赖性。结果显示了LCE在冷却和加热状态下的曲率随着MA/R6M比率的增加而增加,驱动能力(此处定义为加热和冷却状态之间的曲率变化范围)在MA/R6M比为1的LCE中达到最大值。由于该概念取决于光衰减,因此由间隔物确定的液体前体厚度是设计可逆驱动的主要因素。通过实验验证,曲率和驱动能力强烈依赖于前体厚度,在厚度为1 mm时可实现最佳驱动能力。对于更精细的图案,将线宽从1 mm减小到0.8 mm产生类似的驱动能力,进一步减少到0.6 mm会消除驱动能力,这与投影光的分辨率(0.2mm)在平面方向上的光扩散有关。

可逆驱动的条件优化
为了将上述驱动转化为复杂的运动,研究人员类比肌肉驱动机制,该机制通过单个肌肉束的简单收缩/扩张的协同动作来实现不同的运动。研究人员将上述模式弯曲LCE视为一个类似于肌肉束的模块,则在更大的体系结构中,多个弯曲模块的战略安排应通过其协同动作产生更多可设计的运动。按照这一思路,设计并制作了一系列LCE,实现了一系列具有不同形状和驱动运动的体系结构LCE。获得了中心对称LCE,它可以像外壳一样关闭和打开、通过调整长钢带的方向角,可以精确控制长钢带的卷曲、模拟花朵开闭的生物学行为、产生 “s”形,在加热时可以拧紧等体系。所有情况下,有限元分析与实验结果吻合良好,证明了利用该体系结构LCE实现可设计运动多功能性的可能。

LCE的结构设计
综上所述,本文报道了一种利用数字光固化来制造具有驱动运动可设计性LCE的超快直接方法,数字灯的多功能性使得它能够设计具有不同运动的架构式LCE。如果采用高精度和大面积数字光源,则可以制备更大精度的LCE样品。在理论建模的指导下,采用更复杂的机械模式可以在驱动设计中获得更大的自由度。使用光吸收器增强光衰减可以扩大中间层对齐的驱动力,从而扩展材料化学选项,以调整驱动性能,使其超越运动复杂性。该架构作为一个新的设计维度的总体想法可以使许多其他类型的人工肌肉受益。